Open an interactive version of this example on Binder:
![]()
Forward Reachability#
This example demonstrates the forward reachability classifier on a set of dummy data. Note that the data is not taken from a dynamical system, but can easily be adapted to data taken from system observations via a simple substitution. The reason for the dummy data is to showcase the technique on a non-convex forward reachable set.
To run the example, use the following command:
python examples/reach/forward_reach.py
[1]:
import numpy as np
from functools import partial
import matplotlib
import matplotlib.pyplot as plt
from gym_socks.algorithms.reach.separating_kernel import SeparatingKernelClassifier
from gym_socks.kernel.metrics import abel_kernel
from gym_socks.sampling import sample_fn
from gym_socks.utils.grid import cartesian
/home/docs/checkouts/readthedocs.org/user_builds/socks/envs/develop/lib/python3.9/site-packages/tqdm/auto.py:22: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
Generate The Sample#
We demonstrate the use of the algorithm on a non-convex region. We choose to sample uniformly within a toroidal region centered around the origin.
[2]:
@sample_fn
def sampler() -> tuple:
"""Sample generator.
Sample generator that generates points in a donut-shaped ring around the origin.
An example of a non-convex region.
Yields:
sample : A sample taken iid from the region.
"""
r = np.random.uniform(low=0.5, high=0.75, size=(1,))
phi = np.random.uniform(low=0, high=2 * np.pi, size=(1,))
point = np.array([r * np.cos(phi), r * np.sin(phi)])
yield tuple(np.ravel(point))
# Sample the distribution.
S = sampler().sample(size=1000)
S = np.array(S)
Algorithm#
We then run the algorithm to compute the classification boundary. This can be evaluated easily for a large number of test points.
[3]:
# Construct the algorithm.
alg = SeparatingKernelClassifier(kernel_fn=partial(abel_kernel, sigma=0.1))
# Generate evaluation (test) points.
x1 = np.linspace(-1, 1, 50)
x2 = np.linspace(-1, 1, 50)
T = cartesian(x1, x2)
# Train the classifier and classify the points.
labels = alg.fit(S).predict(T)
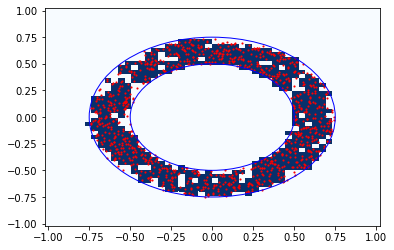
Results#
We plot the results here using “pixels” to represent the points predicted to be within the classification boundary. Since the classifier is point-based, it is difficult to plot the “set” defined by the algorithm. Since the set is non-convex, we cannot use a countour plot that relies upon a convex hull.
[4]:
# Reshape data.
XX, YY = np.meshgrid(x1, x2, indexing="ij")
Z = labels.reshape(XX.shape)
# Plot original data and classified points.
fig = plt.figure()
ax = plt.axes()
plt.pcolor(XX, YY, Z, cmap="Blues", shading="auto")
plt.scatter(S[:, 0], S[:, 1], color="r", marker=".", s=5)
# Plot support region.
plt.gca().add_patch(plt.Circle((0, 0), 0.5, fc="none", ec="blue"))
plt.gca().add_patch(plt.Circle((0, 0), 0.75, fc="none", ec="blue"))
plt.show()
Cite as:
@inproceedings{thorpe2021learning,
title = {Learning Approximate Forward Reachable Sets Using Separating Kernels},
author = {Thorpe, Adam J. and Ortiz, Kendric R. and Oishi, Meeko M. K.},
booktitle = {Proceedings of the 3rd Conference on Learning for Dynamics and Control},
pages = {201--212},
year = {2021},
volume = {144},
series = {Proceedings of Machine Learning Research},
month = {07 -- 08 June},
publisher = {PMLR},
pdf = {http://proceedings.mlr.press/v144/thorpe21a/thorpe21a.pdf},
url = {https://proceedings.mlr.press/v144/thorpe21a.html}
}