Open an interactive version of this example on Binder:
![]()
Derivative Approximation#
This example demonstrates the use of conditional distribution embeddings to compute an approximation of the first and second derivatives of a function,
\[f(x) = x^{3} - 4 x^{2} + 6 x - 24 + \exp(-x)\]
We use an idealized dataset, which approximates the partial derivatives well. Introducing noise to the dataset creates fluctuations that needs to be offset by a higher regularization parameter and smoother kernel.
To run the example, use the following command:
python examples/kernel/derivative_approximation.py
[1]:
import numpy as np
from functools import partial
from gym_socks.kernel.metrics import rbf_kernel
from gym_socks.kernel.metrics import rbf_kernel_derivative
from gym_socks.kernel.metrics import regularized_inverse
from time import perf_counter
import matplotlib
from matplotlib import pyplot as plt
Generate the Sample#
The following sample is idealized in order to demonstrate the technique. Additive noise causes fluctuations in the derivative approximation.
[2]:
sample_size = 200
X_train = np.linspace(-5, 5, sample_size).reshape(-1, 1)
y_train = X_train ** 3 - 4 * X_train ** 2 + 6 * X_train - 24 + np.exp(-X_train)
# Uncomment the following line to incorporate noise in the sample.
# y_train += 10 * np.random.standard_normal(size=(sample_size, 1)) # Additive noise.
X_test = np.linspace(-4, 4, 1000).reshape(-1, 1)
Kernel and Parameters#
[3]:
sigma = 0.1
kernel_fn = partial(rbf_kernel, sigma=sigma)
regularization_param = 1 / (sample_size ** 2)
Compute the Approximation#
[4]:
start = perf_counter()
G = kernel_fn(X_train)
K = kernel_fn(X_train, X_test)
W = regularized_inverse(G, regularization_param=regularization_param)
C = rbf_kernel_derivative(X_train, sigma=sigma)
D = rbf_kernel_derivative(X_train, X_test, sigma=sigma)
y_pred = y_train.T @ W @ K
y_pred_d1 = -y_train.T @ W @ (K * D)
y_pred_d2 = (y_train.T @ W @ (G * C)) @ W @ (K * D)
print(perf_counter() - start)
0.019109775999822887
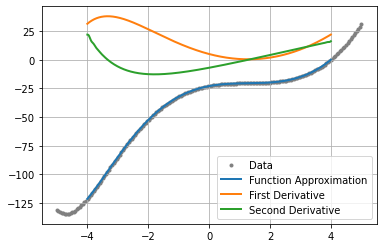
Plot the Results#
We then plot the original function, the first derivative, and the second derivative against the original data.
[5]:
fig = plt.figure()
ax = plt.axes()
plt.grid()
plt.scatter(X_train, y_train, marker=".", c="grey", label="Data")
plt.plot(X_test, y_pred.T, linewidth=2, label="Function Approximation")
plt.plot(X_test, y_pred_d1.T, linewidth=2, label="First Derivative")
plt.plot(X_test, y_pred_d2.T, linewidth=2, label="Second Derivative")
plt.legend()
plt.show()