Open an interactive version of this example on Binder:
![]()
Stochastic Reachability#
This example shows the stochastic reachability algorithm.
By default, the system is a double integrator (2D stochastic chain of integrators).
To run the example, use the following command:
python examples/reach/stoch_reach.py
[1]:
import gym
import numpy as np
from functools import partial
from gym.envs.registration import make
from sklearn.metrics.pairwise import rbf_kernel
from gym_socks.algorithms.reach.kernel_sr import kernel_sr
from gym_socks.sampling import sample
from gym_socks.sampling import default_sampler
from gym_socks.sampling import grid_sampler
from gym_socks.sampling import repeat
from gym_socks.utils.grid import make_grid_from_space
from gym_socks.utils.grid import make_grid_from_ranges
Configuration variables.
[2]:
system_id = "2DIntegratorEnv-v0"
time_horizon = 5
sigma = 0.1
regularization_param = 1
Generate The Sample#
We demonstrate the algorithm on a simple 2-D integrator system, and sample on a grid within the region of interest. Note that this is a simplification in order to make the result look more “uniform”, but is not specifically required for the algorithm to work.
[3]:
env = make(system_id)
sample_size = 3125 # This number is chosen based on the values below.
sample_space = gym.spaces.Box(
low=-1.1, high=1.1, shape=env.state_space.shape, dtype=env.state_space.dtype
)
state_sampler = repeat(
grid_sampler(make_grid_from_space(sample_space=sample_space, resolution=25)), num=5
)
action_sampler = grid_sampler(make_grid_from_ranges([np.linspace(-1, 1, 5)]))
S = sample(
sampler=default_sampler(
state_sampler=state_sampler, action_sampler=action_sampler, env=env
),
sample_size=sample_size,
)
We define the target tube and the constraint (safety) tube, which are sequences of bounded sets indexed by time. Here, we define the target tube such that it is between -0.5 and 0.5, and specify the constraint tube to be between -1 and 1.
[4]:
target_tube = [
gym.spaces.Box(low=-0.5, high=0.5, shape=(2,), dtype=np.float32)
] * time_horizon
constraint_tube = [
gym.spaces.Box(low=-1, high=1, shape=(2,), dtype=np.float32)
] * time_horizon
# Generate test points.
x1 = np.linspace(-1, 1, 50)
x2 = np.linspace(-1, 1, 50)
T = make_grid_from_ranges([x1, x2])
Algorithm#
We then run the algorithm to compute the safety probabilities at each of the test points for the first-hitting time stochastic reachability problem. We can easily change to the terminal-hitting time problem by changing “FHT” below to “THT”.
[5]:
safety_probabilities = kernel_sr(
S=S,
T=T,
time_horizon=time_horizon,
constraint_tube=constraint_tube,
target_tube=target_tube,
problem="FHT",
regularization_param=regularization_param,
kernel_fn=partial(rbf_kernel, gamma=1 / (2 * (sigma ** 2))),
verbose=False,
)
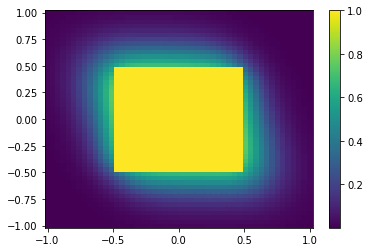
Results#
We then plot the results for all of the test points. The warmer colors indicate higher safety probabilities.
[6]:
import matplotlib
import matplotlib.pyplot as plt
# Reshape data.
XX, YY = np.meshgrid(x1, x2, indexing="ij")
Z = safety_probabilities[0].reshape(XX.shape)
# Plot flat color map.
fig = plt.figure()
ax = plt.axes()
plt.pcolor(XX, YY, Z, cmap="viridis", shading="auto")
plt.colorbar()
plt.show()